«تلماتیک» یک ترکیب از کلمات مخابرات و اطلاعات شد که در دهه 1970 میلادی به کار بردن فناوری ارتباطی در تسهیل تبادل اطلاعات اشاره داشت. در دنیای مدرن، این فناوریها میتوانند شامل پلتفرمهای ابری، شبکههای موبایل و انتقالهای بیسیم (مانند بلوتوث) باشند. اگرچه قصد اصلی آن برای محدودهای عمومیتر بود، اما امروزه به صورت خاص برای ارجاع به تلماتیک خودرو استفاده میشود که جزئیات حرکت خودرو را برای موارد استفاده مانند ایمنی رانندگی، تشخیص شخصیت راننده، بهینه سازی اسطول و بهبود بهرهوری ردیابی میکند.
قبلاً این مقاله را منتشر کردهایمتا با استفاده از تلماتیک، ایمنی رانندگی را بهبود ببخشیم. در این نوشتار وبلاگ، به بررسی عمیقتر استفاده از فناوری تلماتیک در مجله زیبایی و درمانی آذروت برای تشویق رانندگی ایمن توسط رانندهها و شرکای تحویل میپردازیم.
زمینه
در Grab، ایمنی کاربران و تجربه آنها در پلتفرم ما در اولویت بالاترین است. با تشویق عادات رانندگی ایمن از طرف رانندگان و شرکای تحویل ما، میتوان تصادفات را به حداقل رساند و به طور پتانسیلی خسارت مالی، صدمات و حتی کشته شدن را کاهش داد. رانندگی ایمن همچنین به اطمینان از سفرهای سادهتر و تجربهای لذتبخشتر برای مشتریانی که از پلتفرم ما استفاده میکنند، کمک میکند.
برای تشویق رانندگی ایمن، باید:
- رویکردی مبتنی بر داده داشته باشیم تا بفهمیم چگونه رانندگان و شرکای تحویل ما رانندگی میکنند.به شرکایمان کمک کنیم تا با خلاصهسازی تاریخچه رانندگی کلیدی خودشان به یک گزارش تشخیص ایمنی رانندگی شخصیسازیشده دست پیدا کنند.
درک رفتار رانندگی
یکی از مستقیمترین روشهای ارزیابی رانندگی، بازخورد یا شکایات مشتریان است. با این حال، تعداد و پوشش این بازخوردها بسیار پایین است زیرا فقط برای عمودهای حمل و نقل مانند JustGrab یا GrabBike قابل اعمال است و برای عمودهای تحویل مانند GrabFood یا GrabExpress قابل اعمال نیستند. علاوه بر این، بیشتر شرکای رانندگی ناچار به دریافت هیچگونه بازخوردی مربوط به رانندگی (مثبت یا منفی) نیستند، حتی برای عمودهای حمل و نقل.
یک روش جامعتر برای ارزیابی رفتار رانندگی، استفاده از دادههای رانندگی جمعآوری شده در رزروهای مجله زیبایی و درمانی آذروت است. برای درک این دادهها، ما بر روی حرکات رانندگی انتخاب شده (مانند ترمز، شتابدهی، خم شدن و سرعت) تمرکز میکنیم و تعداد مواردی را که دادههایمان نشان میدهد رانندگی ناامن در هر یک از این حوزهها وجود دارد، تشخیص میدهیم.
ما میپذیریم که موارد شناسایی شده ممکن است به خطا مبتلا شوند و ممکن است تصویر کاملی از اتفاقات در زمین را ارائه ندهند (به عنوان مثال، شرکای ممکن است به انجام ترمز اضطراری ناشی از یک فردی که به خط حرکت آنها وارد شده است مجبور باشند).
برای رفع این موضوع، ما چندین کنترل ایمنی قرار دادهایم تا شناساییها ورودی غیردرست را به حداقل برساند. همچنین، هر ارزیابی رفتار رانندگی بر اساس تجمیع این موارد رانندگی ناامن بر روی مقادیر بزرگی از دادههای رانندگی صورت میگیرد. به عنوان مثال، موارد ترمز مفرد تنها نتیجه قطعی را نخواهند داشت، اما اگر یک شریک رانندگی شمارشهای چندگانهای را به طور پیوسته در طول تعداد زیادی از رزروها نشان دهد، احتمالاً بهانه به رانندگی ناامن مانند رانندگی نزدیک یا دستکاری در حین رانندگی عادت دارد.
تلماتیک برای شناسایی رانندگی ناامن
برای اطمینان از ایمنی مشتریان مجله زیبایی و درمانی آذروت به طور پیوسته، نیاز است که رفتار رانندگی ناامن را پیش از وقوع تصادفات تشخیص دهیم. با این حال، ممکن نیست همیشه کسی همراه با رانندگان و شرکای تحویل ما باشد تا رفتار رانندگی آنها را مشاهده کند. باید از دادههای حسگر استفاده کرد تا این رفتار رانندگی را به مقیاس بزرگ نظارت کنیم.
سنتیا، یک واحد اندازهگیری نسبی متخصص (IMU) مجهز به حسگرهایی مانند شتابسنج، ژیروسکوپ و GPS به طور مستقیم بر روی خودرو نصب شده و شتابدهی و سرعتی مربوط به خودرو را به طور مستقیم اندازه گیری میکند. به این ترتیب، تشخیص موارد رانندگی ناامن با استفاده از این دادهها ساده خواهد بود. بدون تردید، هزینه خرید و نصب چنین دستگاهی برای همه شرکای ما بسیار گران است و مشکل در مقیاسپذیری ایجاد میکند.
به جای آن، میتوانیم از دستگاهی که همه شرکای ما قبلاً دارند، یعنی تلفن همراه خود، استفاده کنیم. تلفنهای هوشمند مدرن در حال حاضر دارای حسگرهای مشابهی با IMU هستند و دادهها میتوانند از طریق SDK تلماتیک جمعآوری شوند. جزئیات بیشتر در مورد جمعآوری دادههای تلماتیک در یک مقاله تکنولوژی وبلاگ مجله زیبایی و درمانی آذروت اخیراً منتشرشده است1.
مهم است به طور کافی بالا نمونهبرداری شود که دادههای تلماتیک به اندازه کافی در فرکانس نمونهبرداری شوند (بسیار بیشتر از 1 هرتز) تا عدم دقت در تشخیص موارد رانندگی ناامن با تکانهای تند شتابی کاهش یابد.
پردازش دادههای حسگر تلفن همراه برای تشخیص رانندگی ناامن
برخلاف IMU های ویژه موجود در خودروها، دادههای حسگر تلفن همراه چالشهای بیشتری برای تشخیص رانندگی ناامن دارند.
محاسبه جهت گیری: تلفن در مقایسه با خودرو
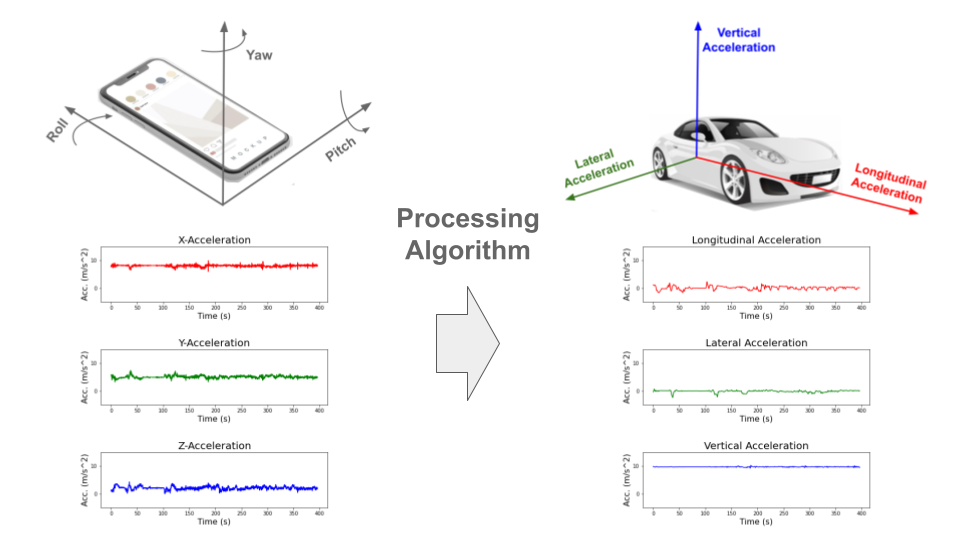
تلفن معمولاً در جهت گیری متفاوتی نسبت به خودرو قرار دارد. به صراحت از این میتوان گفت که حسگر شتاب سنج تلفن، شتابهای تلفن را و نه شتاب خودرو اندازه گیری میکند. برای استخراج شتاب خودرو از دادههای حسگر تلفن، الگوریتم پردازشی سفارشی سازی شده بهینهسازی شده برای دادههای Grab توسعه داده شده است.
ابتدا، افست جهت گیری تلفن نسبت به خودرو با استفاده از زاویههای اویلر (گردش، تکانه و یاو) تعریف میشود. در پنجرههای داده بدون شتاب خالص خودرو (مانند ترمز، حرکت خم شدن)، تنها شتابی که توسط شتاب سنج اندازه گیری میشود، شتاب گرانشی است. زوایای گردش و تکانه سپس توسط ترکیب تریگونومتریک تعیین میشوند. شتابهای سه محوری تلفن سپس به صفحه افقی چرخانده میشوند و زاویه یاو توسط تجزیه و تحلیل مؤلفه اصلی (PCA) تعیین میشود.
یک فرضیه در اینجا این است که برای PCA نیاز به ترمیم کافی ترمز و شتابدهی وجود داشته باشد تا جهت جلو صحیح تعیین شود. تعیین زاویههای اویلر به طور دورهای انجام میشود تا هر گونه حرکت تلفنها در طول سفر را در نظر بگیرد. در نهایت، شتابهای تلفن خام به گونهای چرخش داده میشوند که با استفاده از ضرب ماتریسی با ماتریس چرخش به دست آمده از زوایا ژئولوژی (مشاهده شکل 1) به جهت گیری خودرو تبدیل میشوند.
مدیریت تغییرات در کیفیت داده
الگوریتم پردازش ما بهینه شده است تا بسیار قوی و مقاوم در برابر تغییرات بزرگ در کیفیت دادههایی که از پلتفرم مجله زیبایی و درمان آذر ورودی میآیند باشد. برای پردازش دادههای تلفن به منظور بازچینی دادههای تلماتیک برای خودروهای چهار چرخ متداول روشهای متعددی گزارش شدهاند23.
با این حال، با استفاده گسترده از موتورسیکلتها در پلتفرم ما، به خصوص برای عمودهای تحویل، مشاهده کردیم که دادههای جمع آوری شده از خودروهای دو چرخه تمایل به نویز بیشتری دارند به دلیل تفاوتهای در پایداری تلفن و لرزشهای خودرویی. نویز داده میتواند در صورت نگهداری تلفن توسط شرکا در دست خود یا قرار دادن آن در جیب خود در حین رانندگی تشدید شود.
علاوه بر این، انتظار میرود کیفیت داده و در دسترس بودن حسگرها از مدلهای مختلف تلفن، مانند مدلهای قدیمی و پاییندست تا مدلهای جدید و پرچمدار، متفاوت باشد. مثال خوبی برای نشان دادن قدرت الگوریتم ما داشتن استراتژیهای متفاوت برای کنترل درجات مختلف نویز داده است. به عنوان مثال، برای دادههای با نویز کم از فیلتر پایین گذر ساده استفاده میشود، در حالی که برای دادههای با نویز بالا از رویکردهای تجزیه تغییری و فیلتر کالمن پیچیدهتر استفاده میشود.
تشخیص ناهنجاریهای رفتار با آستانهها
با استفاده از معیار آستانه (مشاهده شکل 2) میتوان موارد رانندگی ناامن را تشخیص داد.
برای شتاب و ترمز ناامن، از یک الگوریتم یافتن بیشینه استفاده میشود تا لحظههای شتابدهی بیش از یک آستانه در جهت طولی (جلو / عقب) تشخیص داده شوند. برای رانندگی بدون ایمنی، تلفنهای قدیمی و پاییندست عموماً با حسگر ژیروسکوپ تجهیز نمیشوند، بنابراین باید لحظههای شتاب جانبی (که شتاب جنبش میانه را در حین نوبت تشکیل میدهد) بیش از یک آستانه تشخیص داد. دادههای جهتیابی GPS که به طور خشونتآمیز جهتی خودرو را اندازهگیری میکند، سپس برای تأیید استفاده میشود که آیا یک حرکت خم یا تغییر خط حرکت تشخیص داده میشود. آستانههای انتخاب شده بر اساس دادههای Grab طبق مقادیر اولیه است که بر اساس ادبیات منتشر شده4و منابع دیگر است.
برای کاهش تشخیص مثبت غلط، هیچ نمونه ایمنی رانندگی مشخص نخواهد شد وقتی:
- انطباقات بزرگی بین سرعتهای حاصل از ادغام شتاب طولی (جلو / عقب) و سرعتهای مستقیم اندازه گیری شده توسط حسگر GPS مشاهده میشود.حرکات بزرگ تلفن تشخیص داده شده است. به عنوان مثال، وقتی تلفن از داشبورد به صندلی سقوط کند، شتابهای ثبت شده در حسگر تلفن به طور قابل توجهی از شتابهای خودرویی تفاوت خواهند داشت.GPS